A roundup of recent products in the GNSS and inertial positioning industry from the July 2019 issue of GPS World magazine.
OEM
Inertial sensors
Sensor fusion with GNSS receiver

Photo: xsens
The MTi 600-series of inertial sensors comes in a 31.5 x 28.0 x 13.0 millimeter IP51-rated case. It produces roll and pitch readings accurate to ±0.2 degrees. GNSS-assisted heading (yaw) measurements are accurate to ±1.0°. Xsens’ sensor fusion algorithms optimize output from new accelerometer, gyroscope and magnetometer components. It also has a CAN bus interface. The MTi 600-series modules are the first from Xsens to include an NMEA-compatible interface for GNSS receivers. Users can choose any GNSS receiver chip, module or system to work alongside the MTi-670, a GNSS/INS device that supplements the pitch, roll and yaw outputs available from other MTi 600-series products with global positioning information.
Xsens, www.xsens.com
Fiber-optic gyroscope
For medium accuracy platforms

Photo: Emcore
The Emcore-Hawkeye series EG-120 FOG module is an ultra-compact, state-of-the-art design that is a small, affordable closed-loop FOG. The EG-120 delivers advantageous size, weight and power (SWaP) and is 35% smaller than Emcore’s previous generation FOGs. The Emcore-Hawkeye EG-120 incorporates advanced, next-generation field programmable gate array (FPGA) electronics that deliver increased performance and reliability combined with low cost. The Emcore-Hawkeye series features performance specifications for medium accuracy platform stabilization applications such as camera systems used in aircraft, unmanned aerial vehicles (UAVs) and gun stabilization systems. A wide variety of other guidance, navigation and aeronautics applications are supported.
Emcore, www.emcore.com
Navigation system
Customizable for ground vehicles of all sizes

Photo: Robotic Research
The RR-N-140 navigation system provides accurate, absolute and relative 3D localization information for ground vehicles of all sizes. It features dual-antenna GNSS for zero-speed heading detection and redundancy. The device delivers exceptional localization performance in GPS-denied or compromised areas. It is designed specifically for use on unmanned ground vehicles and is customizable to incorporate a wide variety of sensor inputs into the navigation solution.
Robotic Research, www.roboticresearch.com
GNSS sensors
Combines numerous interfaces to speed system integration

The P2 Elite GNSS sensor. (Photo: CHC Navigation)
CHC Navigation’s new P2 GNSS sensor series provides high-accuracy positioning and heading in a compact, rugged enclosure. The series is suitable for a wide variety of applications such as reference stations, marine systems, unmanned navigation, industrial automation, robotics and machine control. The P2 GNSS series is designed to significantly reduce system integration efforts by combining numerous connectivity interfaces including RS232, low-latency PPS output, Ethernet, CAN bus protocol and a comprehensive web interface for configuration set-up. The series integrates the latest GNSS technology in a rugged IP67 and lightweight enclosure. It delivers reliable, uninterrupted, high-accuracy, real-time positioning and heading measurements. The P2 GNSS sensor offers cost-effective and powerful real-time kinematic (RTK) positioning. The P2 Pro GNSS adds a dual-antenna input for precise heading data. The P2 Elite integrates additional 4G and UHF modems to provide a powerful, all-in-one GNSS sensor.
CHC Navigation, www.chcnav.com
TRANSPORTATION
Correction stream
Data enables precision positioning

After 2020, Super Cruise will will be available on all General Motors brands (Photo: GM)
RTX Auto is a GNSS software library for use in safety-critical automotive applications. The RTX Auto library can be integrated with any GNSS device and enables the decoding of Trimble’s RTX correction stream for centimeter-level absolute positioning accuracy. It works with other on-vehicle sensors to deliver a certified positioning solution that satisfies advanced driver assistance systems (ADAS) and autonomous driving requirements. It provides RTX-based absolute positioning for General Motors’ Super Cruise, a hands-free driving system for the freeway. After 2020, Super Cruise will will be available on all General Motors brands.
Trimble, trimble.com
Smart antenna
Atlas-capable for marine markets

Photo: Hemisphere GNSS
The Vector V200 single-frequency, multi-GNSS smart antenna with integrated Atlas L-band is designed for general marine applications and markets. Powered by Hemisphere’s Crescent Vector technology, the V200 multi-GNSS compass system utilizes GPS, GLONASS, BeiDou, Galileo and QZSS (with future firmware upgrade and activation) for simultaneous satellite tracking to offer heading, position, heave, pitch and roll output. With support for NMEA 0183 and NMEA 2000, the V200 provides accurate position and heading information to autopilots, chart plotters and other general marine navigation applications.
Hemisphere GNSS, www.hemispheregnss.com
Driver safety solution
Security for intelligent driving

Photo: Quectel
The Proactive Security Solution for Intelligent Driving will enhance safety by supporting ADAS and driver monitoring systems (DMS). It integrates Quectel multi-mode LTE Cat 6 smart modules SC600Y/SC600T and an artificial intelligence (AI) algorithm from a third party to realize ADAS and DMS capabilities including monitoring irregular driving behaviors, conducting precise detection of vehicles and traffic signs, sending warnings of potential risks and more. For ADAS, it can precisely identify and locate vehicles, pedestrians, lanes and traffic signs and will send alerts to drivers if an imminent collision or an unintended lane departure is detected. The DMS supports facial recognition and detection, and is able to monitor driver attentiveness and measure eye blinks as well as head movements so that drivers will receive warnings of distractions, smoking, yawning or looking around.
Quectel Wireless Solutions, www.quectel.com
Automotive module
Aimed at urban lane accuracy

The ZED-F9K module is designed to keep cars in their lanes. (Photo: u-blox)
The ZED-F9K GNSS and dead-reckoning module brings continuous lane-accurate positioning to challenging urban environments. Building on the F9 platform, the module offers both high-precision multi-band GNSS and inertial sensors. It combines the latest generation of GNSS receiver technology, signal processing algorithms and correction services to deliver down to decimeter-level accuracy within seconds. The real-time kinematic (RTK) receiver module receives GNSS signals from all orbiting constellations. The inertial sensors constantly monitor changes in the moving vehicle’s trajectory and continue to deliver lane-accurate positioning when satellite signals are obstructed, such as in parking garages, tunnels, urban canyons or forested areas. The module’s accuracy and low latency make it suitable for automotive OEMs and Tier 1 automakers developing V2X (vehicle-to-everything) communication systems. By continuously sharing their location, V2X systems help increase overall road safety and reduce congestion.
u-blox, www.u-blox.com
UAV
Inertial navigation
Geo-referencing solution improves UAV-based surveying

The Quanta UAV. (Photo: SBG Systems)
The Quanta UAV series is a line of inertial navigation systems (INS) dedicated to UAV-based surveying integrators. The small, lightweight and low-power INS is offered with two levels of accuracy. Quanta UAV and Quanta UAV Extra have been developed for compact lidar to high-end beyond-visual-line-of-site (BVLOS) mapping solutions. They provide precise orientation and centimeter-level position data both in real time and in post processing, eliminating the need for ground control points and reducing the need for overlaps. SBG’s post-processing software Qinertia gives access to offline real-time kinematic (RTK) corrections from more than 7,000 base stations in 164 countries.
SBG Systems, www.sbg-systems.com
CNPC radio prototype
Being tested as command and non-payload control UAS radio

Photo: Allison Barwacz
SkyLink is an L-band frequency-modulated CNPC radio intended for point-to-point or networked BVLOS UAS operations. uAvionix has focused on minimizing size, weight, and power consumption (SWaP) while maximizing range and spectrum efficiency. The current 50-gram 10-Watt prototype is testing successfully at ranges exceeding 40 miles at low altitude. uAvionix is testing under an experimental transmit license and approval from the Federal Communications Commission and Federal Aviation Administration, respectively.
uAvionix, uavionix.com
Thermal drone
Designed for solar farm inspections

Photo: SenseFly
The senseFly Solar 360 UAV is designed to enable the automated and efficient inspection of solar farms. Created in collaboration with software company Raptor Maps, the efficient thermal drone solution enables the automatic assessment of solar plant performance at a sub-module level. Created by combining eBee X fixed-wing drone technology, senseFly’s Duet T thermal mapping camera and Raptor Maps software, senseFly Solar 360 is a fast and fully automated drone. It can be integrated into solar management workflows without requiring either drone piloting skills or the manual analysis of aerial solar-farm data. Solar-farm inspection can be reduced from days to hours, with inspection of utility-scale solar farms completed more quickly, easily and accurately.
SenseFly, www.sensefly.com
Raptor Maps, raptormaps.com
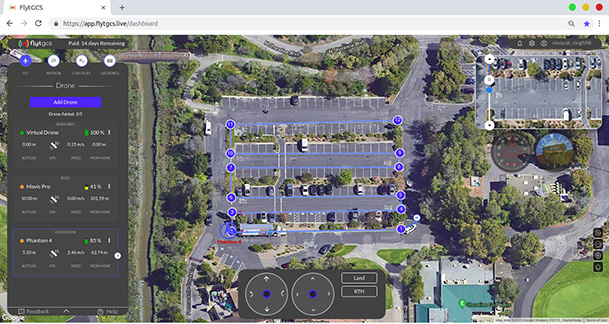
Remote operations
Cloud-based, enables BVLOS

Photo: FlytBase
FlytGCS is built for subject-matter experts, drone operations managers and UAV operators who wish to automate, simplify and scale their missions. To support automated BVLOS missions, FlytGCS offers features such as connectivity and control over 4G/LTE/5G, live high-definition video feed, fleet management, unlimited missions, remote gimbal control, pre-flight checklist and geofence, mission planner and cockpit view from a web dashboard. FlytGCS is a hardware-agnostic solution that helps securely deploy drones using a mobile app (for DJI drones) or onboard single-board computers (for Ardupilot and PX4 drones).
FlytBase, flytgcs.live
Inspection drone
Collects data in dangerous areas

The Elios 2 is a collision-tolerant drone for indoor inspections. (Photo: Flyability)
The Elios 2 UAS is designed for inspection tasks. Routine inspection jobs indoors, underground and around complex pipework become quicker, safer and are fully documented by high-resolution video and stills. The Elios 2 includes a rotatable thermal and high-definition visual camera payload, 10,000-lumen oblique lighting system, and reversible rotors that enable the UAV to back out of tricky situations. The drone’s geodesic-like cage makes it collision-tolerant and enables flight in restricted areas such as refinery enclosures, mines, vats, cargo holds and nuclear containment vessels.
Flyability, www.flyability.com
SURVEY
Battery upgrade
Long-life battery for extended fieldwork

Photo: Geneq
SXblue receivers now have an extended-life battery equipped with 4 Li-ion rechargeable cells that boost its capacity from 3900 mAh to 6000 mAh. When fully charged, the battery can last up to 16 hours depending on the SXblue model and Bluetooth connectivity — an up to 50% increase. The colored LEDs for the battery charge indicator have been enhanced for a better contrast. With only a 6-mm increase in thickness and the same weight as previous models, the user will not notice any change in handiness and ergonomics. The new battery is compatible with all past SXblue II and III models and current iSXblue II+ GPS, SXblue II+ GPS, iSXblue II+ GNSS, SXblue II+ GNSS and SXblue Platinum.
Geneq, geneq.com
Fieldwork tablet
Captures detailed images

DT301X-TR rugged tablet. (Photo: DT Research)
The DT301X-TR rugged tablet includes an Intel RealSense 3D camera. The lightweight military-grade tablet is built to enhance precision for bridge and construction inspections, 3D surveying and mapping of underground utilities. It provides multi-frequency GNSS real-time kinematic (RTK) with carrier phase for mapping and positioning, and supports GPS, GLONASS, BeiDou, Galileo and QZSS. An optional foldable antenna supports high-accuracy field work, which can be measured with RTK GNSS positioning directly or used to connect to an external antenna for higher precision.
DT Research, www.dtresearch.com
GNSS Receiver
Dual-antenna receiver with heading

Photo: Tersus GNSS
The David Plus dual-antenna GNSS receiver offers centimeter-accurate positioning and heading for intelligent transportation, construction, machine control, precision agriculture and navigation. Designed for efficient and rapid integration, the compact, lightweight receiver tracks GPS, GLONASS and BeiDou signals: GPS L1/L2, GLONASS L1/L2, BeiDou B1/B2 from the primary antenna, and GPS L1/GLONASS L1 or GPS L1/BeiDou B1 from the secondary antenna. The modular and flexible design can provide robust positioning and heading accuracy in a compact footprint for UAVs and other smaller autonomous projects.
Tersus GNSS, www.tersus-gnss.com
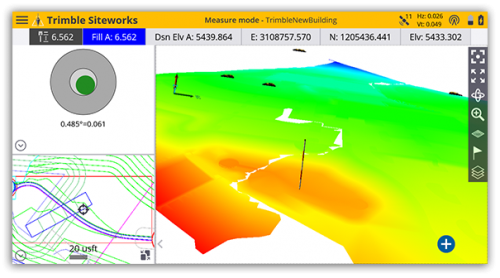
Tilt compensation
Android and Windows compatible

Screenshot: Trimble
Siteworks Software version 1.1 features GNSS tilt-compensation functionality and support for the Android operating system, meaning field workers can use smartphones or tablets. Contractors can run Siteworks on either Windows 10 or Android. Using Trimble Siteworks and a Trimble SPS986 GNSS smart antenna, construction surveyors can take measurements faster and perform more efficient stakeouts. It is designed to shield magnetic interference and can be used effectively anywhere on a construction site. Construction surveyors can capture accurate points without leveling the pole. Three modes support tilt compensation, so contractors can record accurate points while standing, walking or driving the site in a vehicle.
Trimble, www.trimble.com
RTK receiver
Multi-band centimeter-accuracy

Photo: Emlid
The Reach RS2 is a multi-band GNSS receiver that features a built-in LoRa radio, a 3.5G modem, and a survey app for iOS and Android. The receiver determines a fixed solution in seconds and provides positional accuracy down to several millimeters. It tracks GPS/QZSS (L1, L2), GLONASS (L1, L2), BeiDou (B1, B2), Galileo (E1, E5) and SBAS (L1C/A), and reliably works in RTK mode on distances up to 60 kilometers and 100 kilometers in PPK mode. A multi-feed antenna with multipath rejection offers robust performance even in challenging conditions. RINEX raw data logs are compatible with OPUS, CSRS-PPP, AUSPOS and other PPP services so users can now get centimeter-precise results.
Emlid, emlid.com
Gilla detta:
Gilla Laddar in …