
Photo: JamieB333/Shutterstock.com
A sonar survey, camera and sensor data of the world’s largest marine sinkhole is shining light on sea level and climate change over 100,000 years.
From Nov. 27 to Dec. 13, 2018, the Blue Hole Belize Expedition mapped the sinkhole. Led by Aquatica Submarines, the team of scientists, explorers and film makers included Virgin ’s Sir Richard Branson and Fabien Cousteau, grandson of the conservationist Jacques Cousteau.
Kongsberg used both surface and submarine-mounted sonar equipment.
Sonar expert Mark Atherton from Kongsberg’s Canadian subsidiary Kongsberg Mesotech was a key member of the science-based sonar and scientific data collection team. Atherton operated the sonars aboard the Research Vessel Brooks McCall, contributing to an invaluable high-resolution map of the entire sinkhole.
“By understanding the geological history and geometric structure at the Blue Hole we can contribute new data to the global scientific community studying sinkholes and cenotes,” he said.

Photo: Aquatica Submarines
Aquatica Submarine’s Stingray 500 submarine was used for sonar surveying, filming and dives. The team conducted more than 20 dives into the large sinkhole, taking videos and 3D images during each trip. They also completed a two-hour live broadcast featured on The Discovery Channel.
A key outcome of the Expedition is creation of a complete 3D sonar map of the Blue Hole. The sonar map is enhanced with other passive submarine-collected environmental data. Once processed and collated, the data will be shared with the Government of Belize and the larger global scientific community as a legacy from the expedition.

Perimeter Markers: Using an SBG Systems Ellipse receiver positioned directly over suspended tripods, positions were locked in the MS1000 processing software the instant each tripod touched bottom. With no current within the Blue Hole and the tripod and sonar weighing 21.7 kg, there was no issue with offset position differences between the vessel and the tripod hanging plumb during deployment. (Image: Mark Atherton/Kongsburg)
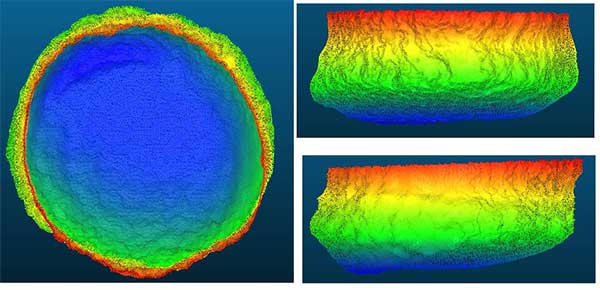
Processed Scan Data: A dual-axis sonar (DAS) system collected point-cloud data to create a 3D representation of the Blue Hole. The unit was pole-mounted on the survey vessel with the GPS and motion reference unit directly over the scanner’s head. (Image: Mark Atherton/Kongsburg)

Mosaic: GPS tripod position and target matching on overlapping scans were used to align the 50-, 75- and 100-meter-range data collected at 21 drop locations. This mosaic is a very close approximation of the bottom of the Blue Hole. (Image: Mark Atherton/Kongsburg)