Aerial imagery business Nearmap has launched its new 3-D product to streamline the way industries such as urban planning, architecture, construction, government and councils view and shape cities across Australia and the U.S.
The company is also previewing its groundbreaking artificial intelligence (AI) technology at its customer event Navig8.
Nearmap 3-D allows customers to stream and export 3-D imagery on demand at massive scale through its proprietary MapBrowser web application. Because the imagery is updated frequently, businesses can work with the most current information to make more informed decisions.
Nearmap’s new AI technology is turning millions of aerial images — captured over a decade and multiple times a year — into valuable datasets. The datasets can be used to more accurately and efficiently measure change and quantify attributes, such as solar panels, pools, roofs or construction sites.
Organizations ranging from small businesses to large companies and cities will be able to take advantage of AI-driven location intelligence.
“Product innovation is in our DNA. Everything we do has the customer at the core,” said Tony Agresta, executive vice president of product at Nearmap. “Our customers’ worlds are evolving every day. We need to keep innovating to continue to give our customers a competitive advantage through technology breakthroughs like the ones we are sharing today at Navig8.
“Nearmap 3-D is the result of a significant investment in R&D, but also listening to our customers and what they need to transform the way they work,” Agresta said. “Accessing 3-D imagery up to now has typically been an arduous, time-consuming and expensive process — but not anymore. This represents the single largest, most frequently updated footprint of 3-D accessible through a browser. The ability to measure in 3-D space, size up an area and then export Nearmap 3-D for use in other platforms will transform the aerial imagery market.
“The AI technology that we’re working on will allow organizations to identify locations with specific attributes and in so doing, reduce site visits, generate more leads, and eliminate the time involved to inspect properties manually. Nearmap AI does the heavy lifting so you don’t have to,” Agresta said.
Composite aerial image of Perth, Australia. (Image: Nearmap)
Instant access to 3-D through MapBrowser
Nearmap is making 3-D imagery accessible to anyone, in the same way it has with 2-D. While Nearmap has offered 3-D imagery since 2017, this new iteration of the technology allows users to instantly stream 3-D content at massive scale via its MapBrowser web application.
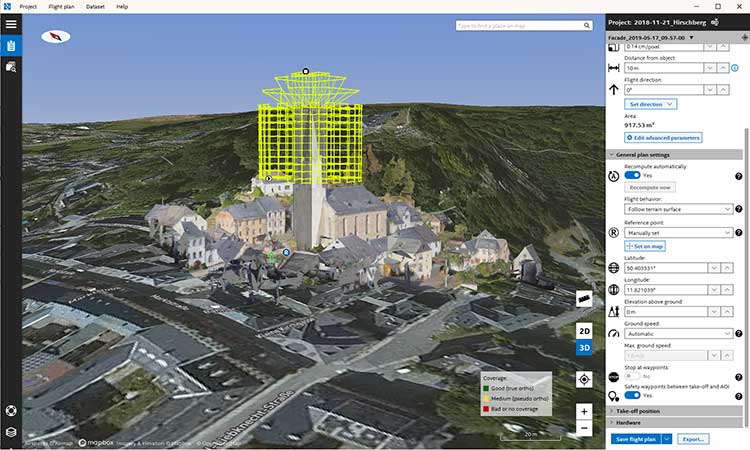
The lightweight platform offers customers an immersive 3-D experience, allowing them to visualize cities in 3-D from any direction, measure distances, and immediately export a custom area in a variety of 3-D formats at unprecedented speed — the download time is a matter of minutes for most requirements and only a few hours for very large footprints.
“It’s like switching from DVDs to streaming services,” said Tom Celinski, executive vice president of technology and engineering at Nearmap. “Our camera technologies have been capturing 3-D since 2017, but now our secret sauce is bringing it onto MapBrowser, allowing users to easily and instantly stream this content with many export options. Now users can visualize, measure, define a custom area, export our 3-D and use it in their workflows with other commercial platforms and tools. We’re helping 3-D experts and novices alike access reality like never before, and this is an important next step in our Reality as a Service journey.”
Nearmap 3-D comes with an extensive library, covering more than 400,000 square kilometers. It is updated once a year and covers major urban areas in Australia and the U.S.
“We live in a 3-D world, we think in 3-D, and so we have to ensure that our products give the closest representation of reality as possible,” Celinski said. “That means businesses that rely on visualizing 3-D content, like architects, for example, can now access up-to-date 3-D models instantly and export them in just minutes. In a tender process, for example, that can be the difference between winning a new project or not. The opportunities for Nearmap 3-D are endless.”

3D image of Manhattan. (Photo: Nearmap)
A living data set
Nearmap AI technology is the result of more than two years’ worth of research and development, and a team of close to 20 data scientists and machine learning engineers. The team, led by Dr. Michael Bewley, is using the petabytes of imagery that the business has captured over the past 10 years and turning it into a living dataset to accurately identify changes or quantify attributes from the Nearmap library of aerial imagery.
Nearmap has built highly accurate machine learning models and deployed them on a massive scale. The automated process, and the constantly learning engine, means that the AI technology can be applied to any new geography. Nearmap also applies the models to new surveys, generating fresh results with current imagery.
To date, Nearmap has performed analysis on over 1 million square kilometers of imagery across Australia and the U.S. (which constitutes about 80 million properties) and is performing more analysis every day. Nearmap is now inviting customers to take part in a beta program to experiment with various use cases.
“We don’t prescribe how our technologies or content can be used by our customers,” said Michael Bewley, director of AI systems at Nearmap. “Our solar customers could use the AI technology to easily identify where and when solar panels have been installed for maintenance jobs, to prospect new clients in an area where solar energy’s popularity is on the rise; or a government entity that previously had the arduous task of tracking swimming pools or construction in their jurisdictions will be able to do it automatically.”
“But this is the tip of the iceberg — we’re just getting started. This technology is going to profoundly change the way that cities are built,” Bewley said. “Our plans include delivering AI results in many forms, much the same way we deliver our imagery today.”
Both technologies will be presented at Nearmap’s flagship event, Navig8, in Perth on June 6, Melbourne on June 11 and Sydney on June 13.